关键词 > EEET2224
EEET2224 Power Electronic Converters
发布时间:2025-10-17
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
EEET2224 Power Electronic Converters
End-Semester Test - Sample
Question 1 (10 Marks)
![]() A single phase H-Bridge inverter (Fig 1) is used to control a DC motor load with an armature resistance and inductance of 5Ω and 10mH respectively. At nominal speed the motor back- emf is εa = 150V while supplying a positive torque load. The H-Bridge DC link is 400V, and a hysteresis controller is used to regulate the current within permissible error range of ±2.5A.
A single phase H-Bridge inverter (Fig 1) is used to control a DC motor load with an armature resistance and inductance of 5Ω and 10mH respectively. At nominal speed the motor back- emf is εa = 150V while supplying a positive torque load. The H-Bridge DC link is 400V, and a hysteresis controller is used to regulate the current within permissible error range of ±2.5A.
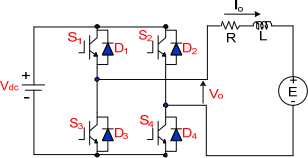
Fig. 1. Single Phase H-Bridge Converter with DC motor
(a) Sketch the converter output current and voltage waveform for one complete switching cycle if a THREE level hysteresis controller is used. Indicate on your sketch the peak to peak current ripple, the output voltage (Vo) magnitude and the time (ms) of each switching state. [4 marks]
t1=0.2ms
T-t1=0.33ms
(b) Calculate the converter switching frequency at nominal operating speed, as well as the maximum possible switching frequency, if a TWO level hysteresis controller is used. [4 marks]
fsw(at nominal speed) = …………3.42kHz … .. … … . … . … … … … … … … … … … … …
max (fsw) = ………………………4kHz … . … . … . … … … … … .. … … … … … … … …
(c) Considering a TWO level Hysteresis controller, what will be the impact on the converter switching frequency if the motor speed is reduced to half of the nominal speed (assume motor torque remains unchanged). Briefly justify your answer. [2 marks]
Impact:
Justification:
………………….……………………….………………….……………………….…
……………….……………………….………………….……………………….……
…………….……………………….………………….……………………….………
Question 2 (10 Marks)
A three phase inverter is fed from a 600V DC source and supplies a 50Hz back-emf load with a nominal RMS voltage of 400V(line to line), through an inductive filter with a series resistance of 5Ω and a series inductance of 5mH. The inverter is current regulated using a Proportional + Resonant (PR) controller and a sine-triangle symmetric regularly sampled pulse-width-modulator with carrier frequency of 15kHz.
(a) Calculate the maximum controller bandwidth (ωc) that can be achieved for a phase margin of 40˚ [3 marks]
(b) Determine the controller proportional gain Kp and the integrator reset time Tr that would enable the controller bandwidth calculated in 2(a) to be realised. [2 Marks]
![]() c(max ) = ……8.726k rad/s ……… Tr = ……1.14ms. … … … … Kp = ………0.145… …
c(max ) = ……8.726k rad/s ……… Tr = ……1.14ms. … … … … Kp = ………0.145… …
(c) The inverter controller is replaced with a Proportional + Integral (PI) controller. The PI controller integrator reset time Tr is 2 ms and the controller 0dB crossover frequency ωc is 10krad/sec, determine whether the system is stable and calculate the associated phase margin of the system. Take into consideration the all second order effects. [4 Marks]

fsw = … … … … . … … … … … … … … … … … … … … … … … … . … … … … … … … … … .
(d) What will be the impact on the controller parameters (ωc(max), Kp and Tr) if a Proportional + Integral (PI) controller is used. [1 Mark]
Impact:
………………….……………………….………………….……………………….
………………….……………………….………………….……………………….
………………….……………………….………………….……………………….
………………….……………………….………………….……………………….
………………….……………………….………………….……………………….
………………….……………………….………………….……………………….
………………….……………………….………………….……………………….
Question 3 (10 Marks)
The 5kW converter shown in Fig 2 is used to control the current of a DC motor with an armature resistance of 2.5Ω and an inductance of 10mH. At nominal operating speed, the motor back-emf is 200V.
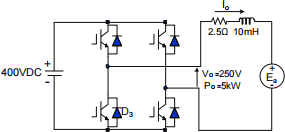
Fig. 2. H-Bridge converter controlling the DC motor
(a) If the current of the DC motor is regulated using the Proportional + Integral (PI) controller with a proportional gain Kp of 0.05, an integrator reset time Tr of 1ms and a controller 0dB crossover frequency ωc of 2000rad/sec, calculate the magnitude of the absolute steady-state current error due to the reference at the rated converter current.
(HINT: All second order effects can be ignored) [4 Marks]
Error due to reference current = ………0 A … … … … … … … … … … … … … … …
(b) If the current of the DC motor is regulated using the Proportional (P) controller with a proportional gain Kp of 0.05, calculate the magnitude of the absolute steady-state current error due to the reference at the rated converter current.
(HINT : All second order effects can be ignored) [4 Marks]
Error due to Reference Current = 2.22A … … … … .. … .. … … … … …
(c) Specify two controllers or methods to achieve zero steady-state error for AC current regulation. [2 Marks]
1. … … … … … … … . … … … … … … … … … . … … … … … … … . … … … … … … … …
2. … … … … … … … . … … … … … … … … … . … … … … … … … . … … … … … … … …
