关键词 > ACS336
ACS336 Take-Home Quiz Briefing
发布时间:2024-05-27
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
ACS336
Take-Home Quiz Briefing
December 30, 2023
Introduction
This document contains a set of questions designed to assess your knowledge of the modelling, simulation and control aspects of this course. This assignment is worth 35% of the overall module mark.
Submission Details
This is a Crowdmark Assessment Students are requested to upload a single solution file, in any of the following formats; PNG, JPEG or PDF. The upload point can be found within the Assess-ment folder, located in the menu for the module on Blackboard. The solution file should be a scanned/photographed copy of your lab report. Students are encouraged to write the lab report in a concise and precise fashion. The report should be no longer than 6-pages (including answer sheets 1 and 2 at the end of this document).
The deadline for submission is 23:59 on Sunday of week 11 (12 May 24).
Late submissions will be docked 5% for each day late, up to a maximum of 5 working days. In the event of extenuating circumstances, students must submit an extenuating circumstances form if they have any medical or special circumstances that may have affected their performance on the assignment. You may not collaborate with other students, past or present.
Feedback
This is the final component of assessment for this module. As a consequence of this the marks need to be checked and verified by the Department before they are returned to you. This means that you will receive your overall mark after the exam board and at the same time as the final marks for the rest of your semester 2 modules. Feedback on class performance will be made available to all students as part of the module review. This is sufficiently detailed to allow students to understand the common mistakes made in each question. This feedback will be made available shortly after the Summer Exam Board Meeting. Please note, it is not our policy at this time to release marked scripts back to students for this particular assignment. In the event that you are unsatisfied with the provided feedback, individual scripts are viewable in line with the Department’s procedures for viewing exam papers: http://www.sheffield.ac.uk/acse/current/examviewing
Questions
1. List five significant ways in which the dynamics of your SIMULINK model of the helicopter hardware differs from the dynamics of the actual hardware. In other words, list five signif-icant phenomena that have not been modelled accurately, or have not been modelled at all. (20 marks)
Please be precise with your answers. For example, an answer along the lines dynamic friction about the elevation axis exists in the hardware, but has not been included in the simulation model is acceptable, whilst the hardware is more complicated than the simulation model is not.
2. Imperfect modelling results in the output response (in terms of the elevation, pitch and travel angles) to differ between the SIMULINK model and the actual hardware. With respect to your answers to the previous question, select the modelling discrepancy that you believe creates the largest error in output response between the SIMULINK model and the actual hardware. Care-fully describe how you would improve the SIMULINK model with a view towards reducing this modelling discrepancy. (10 marks)
An example of a good answer is as follows. The dynamic friction about the elevation axis could be approximated by a linear damping term (τe, say) that resists angular velocity ˙E, and which would appear as an extra term on the right hand side of the governing equation for motion about the elevation axis. This could be modelled as τe(t) = −ke˙E(t), with the value for the damping coefficient ke determined from an experiment that involved measuring the time taken for the helicopter to drop to its lower angular limit when released from rest from its upper angular limit. The SIMULINK model for the elevation dynamics block would then be modified for the inclusion of this extra damping term.
An example of a bad answer, lacking in sufficient detail, is as follows. I would include a model of the friction.
3. A major source of plant/model mismatch is the lack of a model that accounts for the dynamic friction that exists about the elevation axis. As mentioned above, this could be approximated by a linear damping term of the form τe(t) = −ke˙E(t), where ke ∈ R+ is a linear damping co-efficient. The inclusion of this term would result in the following modified governing equation of motion about the elevation axis:

where all terms in (1) are defined as above and in the lecture notes.
• An incomplete SIMULINK block diagram of (1) is shown in Figure 1. Sketch on the ad-ditional block(s), together with the necessary connections between all blocks, in order to complete the block diagram representation of (1). Scan, or photo the completed diagram and append to the back of your lab report. (5 marks)
• Your existing helicopter controller (prior to state augmentation) was synthesised from the following linear state-space model:
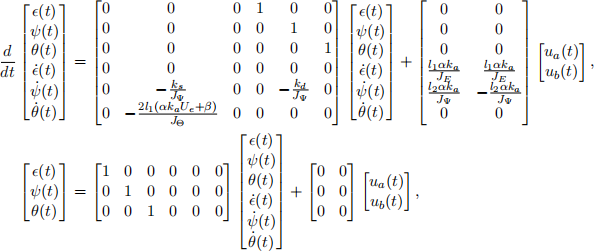
where all terms are defined as in the lecture notes. A copy of this state-space model is included in the back of this handout. The linear damping term on the far right of (1) can be included in the controller design by appropriate modification of the state-space matrices above. On the copy in the back of this handout, circle any element(s) of the state-space matrices that you would change in order to accommodate the linear damping term, and state the new value of the circled element(s). Scan, or photo the completed diagram and append to the back of your lab report. (5 marks)
4. As part of your lab exercises, you were asked to note the value of the constant input voltage Ue required to achieve level hover. The modelled value of Ue is unlikely to have been equal to the actual value of Ue. One consequence of this is that the helicopter will not achieve hover in the horizontal position under the action of an open-loop controller. Assuming your modelled value of Ue is different from your actual value of Ue, precisely explain which feature(s) of your feedback controller ensure that horizontal hover is achieved. (10 marks)
5. If a pitch angle sensor was not available to measure the pitch angle, would you still be able to use a full state feedback controller? Carefully explain your answer, using mathematical treatment, if necessary. (10 marks)
6. Write down your final design values for Qx and Qu, the state and control penalty matrices used in the design of your LQR controller. Explain your reasons for selecting these values. (10 marks)
7. Imagine you are presenting your controller to the manufacturers of the helicopter hardware with a view to licensing it. The manufacturers need convincing that your controller is worthy of investment. Demonstrate to the manufacturers that your controller meets the prescribed per-formance requirements. First, provide quality figures of your simulated closed-loop controller response. Specifically, provide the following:
• A plot of reference and output elevation angles against time,
• A plot of reference and output travel angles against time,
• A plot of the pitch angle against time,
• A plot of the control signal Ua,b against time.
Second, referring to your plotted responses and in fewer than 200 words, explain the perfor-mance of your helicopter in terms of how it responds to changes in reference inputs. Marks are awarded for clear communication and quality of the figures. (30 marks)
Point to note for technical reports
• Please ensure that you clearly demonstrate your responses meet the performance specification. This should be quantitative and comparative. You should define the specification and then state your quantitative metric that meets each performance specification in turn. This is a significant part of validation and verification during model based design.
• Consider the language you use to describe your responses. For example what does ”good response”, ”good rise time”, ”minimal steady state errors” actually mean? Can you describe these with quantitative metrics?
