关键词 > MECH265001
MECH265001 Mechatronics & Measurement Systems 2023
发布时间:2024-05-16
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
MECH265001
Mechatronics & Measurement Systems
May/June 2023
Q1. Wheatstone Bridge & Op-Amp
The Wheatstone bridge with the op-amp circuit is shown in Figure Q1-A.
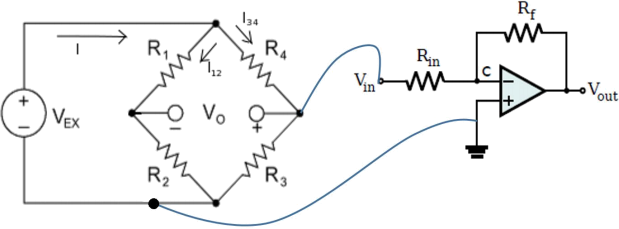
Figure Q1-A
where R1 = R2 = 120 [Ω], R3 = 200 [Ω], R4 = 40 [Ω], VEX = 1.5 [V], Rf = 20kΩ and Rin = 1kΩ .
The Wheatstone bridge with respect to two nodes connected to the Op-Amp circuit in Figure Q1-A can be transformed into the equivalent circuit shown in Figure Q1-B.
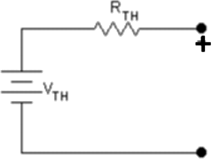
Figure Q1-B
a) Obtain the equivalent resistance, RTH. [5 marks]
b) Obtain the equivalent voltage, VTH. [5 marks]
c) Calculate the op-amp output voltage, Vout. [15 marks]
Q2. DC Motor Control
A simplified DC motor with the supplied voltage, V, is shown in Figure Q2:
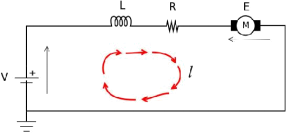
Figure Q2
where L is the inductance of the motor, R is the internal resistance, and E is the back EMF (electromotive force).
a) Assume the current, i(t) is zero at time, t=0, find the transfer functions, G1(s) and G2(s) in the following equation:
I(s) = G1(s)V(s)+ G2(s)Ω(s)
where I(s), V(s) and Ω(s) are the Laplace transform of i(t), V(t) and 幼(t), the angular velocity of the motor, respectively. [10 marks]
b) A feedback controller to the motor is given by V(t) = kp 幼 (t) , where kp is the control gain. Obtain the closed-loop transfer function, GCL (s), in the following equation: I(s) = GCL(s)Ω(s) . [5 marks]
c) Obtain the inequality condition for GCL(s) being stable and explain why the inequality is always satisfied in general. [5 marks]
d) Obtain the steady-state value of the current to the constant angular velocity, c . Note that the Laplace transform of constant c is equal to c/s. [5 marks]
Q3. Hydraulic and Pneumatic Systems
An off-road vehicle is driven by a hydraulic motor in each of its six wheels (see the Figure Q3 below). The hydraulic power is supplied by a single variable displacement pump turned at constant speed by the engine, and the system pressure is limited by a relief valve. The system has the following specifications:
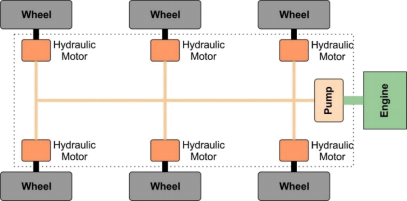
Figure Q3
Vehicle:
· Vehicle mass 5 000 kg
· Vehicle wheel radius 0.25 m
Engine:
· Maximum engine power output 240 kW
Hydraulic system:
· Relief valve setting 100 bar
· Hydraulic pump:
o Volumetric efficiency of pump 85%
o Mechanical efficiency of pump 85%
· Hydraulic motor:
o Motor displacement 3×10-4 m3/rad
o Volumetric efficiency of motor 90%
o Mechanical efficiency of motor 90%
If the vehicle is climbing a 40° slope, calculate:
a) Vehicle forward force (N). [5 marks]
b) Torque at each wheel (Nm). [5 marks]
c) Vehicle max speed (m/s). [5 marks]
d) Hydraulic pump pressure (bar). [5 marks]
e) Hydraulic pump flow rate (m3/s). [5 marks]
Q4. Smart Actuation Systems
Two strips of PZT are bonded to form a bimorph actuator shown in Figure Q4 below. Each strip has the following specification:
· Dimensions: Length = 20 mm, Width = 6 mm, Thickness = 0.5 mm
· PZT charge constant: d13 = -133×10-12 m/V
· PZT Young’s Modulus: E = 70×109 N/m2
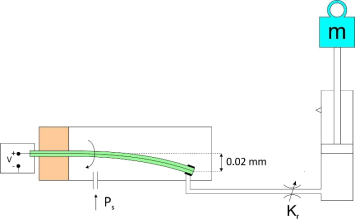
Figure Q4
a) What is the deflection (in µm) when voltage is 150 V and there is no load on the bimorph? [5 marks]
b) What is the value of the blocked force (in N) at this voltage? [5 marks]
c) This bimorph actuator is used in a miniature pneumatic valve, as shown in Figure Q4, to operate a pneumatic cylinder at steady state velocity of 0.2 m/s under a 1 kg mass. What is the required bimorph voltage to seal the valve output with a 1 mm2 port and 2.58 bar supply pressure (Ps)?
(Kr = 4.5×10-7 m4.s-1 .N-0.5 , cylinder’s piston area = 2×10-4 m2 , cylinder’s rod area = 0.5×10-4 m2) [15 marks]
