CSCE 311 – Operating Systems Project 2
CSCE 311 – Operating Systems
Project 2
50 Points
Assigned on: March 9th, 2021
Due: April 4th, 2021 @ 11:59 pm
Deliverables: Your 2 final c files (<username>_t1_p2.c and <username>_t2_p2.c)
Setting Things Up
Options:
● Your own Linux installation (Native or VirtualBox)
● Connecting to the Linux Labs via ssh/scp
● Windows Subsystem for Linux
SSH to labs:
ssh -p 222 [email protected]
Where you will replace coleca with your username.
You will then be asked for a password and then a two-factor login request.
Getting your files back to your local machine (scp):
scp -P222 [email protected]:~/coleca_p2.c .
Where you will replace coleca with your user name and the ~/trace1.log with the correct path to where your trace1.log is on the server.
Before you start:
Make sure that you have gcc installed. In terminal:
gcc -v
Should return this (or something like it)
Task 1 (15 points)
Linux supports POSIX semaphores defined in <semaphores.h>. We will use these to synchronize a set of concurrent POSIX threads.
A semaphore is an object of type sem_t. Consult the manual pages on a Linux machine to understand the following library functions:
int sem_init(sem_t *sem, int pshared, unsigned int value);
int sem_wait(sem_t *sem);
int sem_trywait(sem_t *sem);
int sem_post(sem_t *sem);
int sem_getvalue(sem_t *sem, int *sval);
int sem_destroy(sem_t *sem);
The POSIX thread library define in <pthread.h> provides the following functions for pthread_t thread objects:
int pthread_create(pthread_t *thread, const pthread_attr_t *attr, void
*(*start_routine)(void *), void *arg);
int pthread_join(pthread_t thread, void **value_ptr);
void pthread_exit(void *value_ptr);
Consider the incomplete program attached to the project (task1.c).
There are a couple of problems with this program. First of all, the threads do not have a chance to complete, because the main program terminates without waiting for them. Second, the threads are not synchronized and therefore the text output is garbled.
Your task is to add semaphores to this program to synchronize the threads. You may declare the semaphores as global objects. The correct output should look like this:
A semaphore S is an integer-valued variable which can take only non-negative values. Exactly two operations are defined on a semaphore:
Signal(S): If there are processes that have been suspended on this semaphore, wake one of them, else S := S+1.
Wait(S): If S>0 then S:=S-1, else suspend the execution of this process.
The process is said to be suspended on the semaphore S.
The semaphore has the following properties:
1. Signal(S) and Wait(S) are atomic instructions. In particular, no instructions can be interleaved between the test that S>0 and the decrement of S or the suspension of the calling process.
2. A semaphore must be given an non-negative initial value.
3. The Signal(S) operation must waken one of the suspended processes. The definition does not specify which process will be awakened.
Note: to link the Pthread library, use gcc option -lpthread as in:
gcc task1.c -lpthread
./a.out
Task 2 (35 points)
In a heroic effort to meet increasingly tighter shipping deadlines, a company has employed a Bidirectional Autonomous Trolley (BAT) system to move products from its warehouses to the delivery trucks. Each BAT is a mobile platform that travels on separate tracks back and forth between a warehouse and a truck. Because the goods are fragile, the tracks are perfectly leveled, which requires the placement of level crossings between warehouses. At most one BAT can cross at a time. Traffic at the crossing arriving from the right has the right of way. But this presents a problem, as the company soon found out when a simultaneous shipment of plastic penguins and black umbrellas caused the system to come to a grinding halt. Two BATs with the shipments and two other BATs returning to the warehouses were deadlocked at a level crossing:
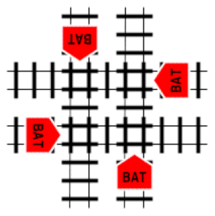
In our system each BAT is controlled by a separate thread. It is your task to create BATMAN: a BAT Manager
We need a condition variable per BAT to queue BATs arriving from one direction (NorthQueue, EastQueue, SouthQueue, WestQueue). For example, when a BAT from North is already at the crossing, a second BAT from North will have to wait.
Another type of condition variable is needed to let BATs from the right have precedence to cross (NorthFirst, EastFirst, SouthFirst, WestFirst). However, using this rule can cause starvation. To prevent starvation, when a BAT is waiting to cross but BATs continuously arriving from the right have the right of way, we will let a BAT that just passed the crossing signal a waiting BAT on his left.
When deadlock occurs the BAT Manager must signal one of the BATs to proceed, e.g. the BAT from North. You will need a counter for each direction to keep track of the number of BATs waiting in line.
The program must take a string of 'n', 's', 'e', 'w' from the command line indicating a sequence of arrivals of BATs from the four directions. For example:
$ ./batman nsewwewn
BAT 4 from West arrives at crossing
BAT 2 from South arrives at crossing
BAT 1 from North arrives at crossing
BAT 3 from East arrives at crossing
DEADLOCK: BAT jam detected, signalling North to go
BAT 1 from North leaving crossing
BAT 3 from East leaving crossing
BAT 2 from South leaving crossing
BAT 4 from West leaving crossing
BAT 6 from East arrives at crossing
BAT 5 from West arrives at crossing
BAT 8 from North arrives at crossing
BAT 5 from West leaving crossing
BAT 6 from East leaving crossing
BAT 8 from North leaving crossing
BAT 7 from West arrives at crossing
BAT 7 from West leaving crossing
Note: the ordering of the above arrivals and departures may vary between runs and implementations. You don't need to produce exactly the same output.
To summarize:
● BATs arriving from the same direction line up behind the first BAT already at the crossing;
● BATs arriving from the right always have the right of way (unless the waiting BAT receives a signal to go);
● Deadlock has to be prevented
● Starvation has to be prevented
To implement the solution, analyze the actions of a BAT arriving from a particular direction under different circumstances, i.e. another BAT is already at the crossing, there is a BAT at the right, and/or there is a BAT at the left. Determine what to do when it arrives at the crossing and it must wait in line or wait for the BAT at his right, what to do when it passed the crossing, and what to do when it leaves the crossing.
Consult the manual pages on a Linux machine to understand the following library functions on mutex locks (pthread_mutex_t) and condition variables (pthread_cond_t):
int pthread_mutex_init(pthread_mutex_t *mutex, const pthread_mutexattr_t *attr);
int pthread_mutex_lock(pthread_mutex_t *mutex);
int pthread_mutex_unlock(pthread_mutex_t *mutex);
int pthread_mutex_destroy(pthread_mutex_t *mutex);
int pthread_cond_init(pthread_cond_t *cond, const pthread_condattr_t *attr)
int pthread_cond_signal(pthread_cond_t *cond);
int pthread_cond_wait(pthread_cond_t *cond, pthread_mutex_t *mutex)
int pthread_cond_destroy(pthread_cond_t *cond);
The BATMAN monitor has the following high-level structure:
monitor BATMAN
{
... // shared data, e.g. counters
condition variable NorthQueue, EastQueue, SouthQueue, WestQueue,
NorthFirst, EastFirst, SouthFirst, WestFirst;
arrive(BAT b)
{
printf("BAT %d from %s arrives at crossing\n", b.num, b.dir);
... // code to check traffic in line, use counters, condition variables etc.
}
cross(BAT b)
{
... // code to check traffic from the right, use counters, condition variables etc
sleep(1); // it takes one second for a BAT to cross
}
leave(BAT b)
{
printf("BAT %d from %s leaving crossing\n", b.num, b.dir);
... // code to check traffic, use counters, condition variables etc.
}
check()
{
... // the manager checks for deadlock and resolves it
}
};
A BATs execute the following operations:
arrive(b);
cross(b);
leave(b);
It takes a BAT one second to cross. Use sleep(1) to simulate the BAT's progress.
The BAT manager executes the following operations:
while BATs are active do
check();
Note that you need a mutex lock to implement the monitor.
2021-04-15