Physics 2301: Problem Set #4
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
Physics 2301: Problem Set #4
These problems are due by the end of the day on Wednesday Feb 9.
1. 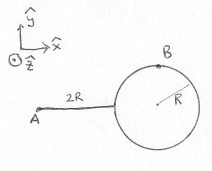 Consider a crude model of a tennis racquet, consisting of a hoop of mass m and radius R attached to a handle of length 2R which also has mass m.
Consider a crude model of a tennis racquet, consisting of a hoop of mass m and radius R attached to a handle of length 2R which also has mass m.
(a) Find the three principal moments of inertia for this object.
(b) The racquet is initially floating motionless in outer space when it is struck by a downward blow at point B, giving the system momentum P in to the page. Find the spin ω→ after the blow.
(c) Find the velocity (v→A ) of the point at the end of the handle immediately after the blow.
(d) What is the kinetic energy of the racquet? (Yes, even this simple setup can yield fractions involving integers as strange as 97.)
2. Morin 9.52 (Horizontal ω) p. 426
3. Morin 10.19 (Circular pendulum) p. 483. Also add part (c): find ω when we replace the point mass m by a uniform stick of length l. Work in the rotating frame, and do an integral over all the dm’s to find the torque from the centrifugal force.
4. Morin 10.20 (Spinning bucket) p. 483
5. Morin 10.22 (Bug on a hoop) p. 483
6. Morin 10.23 (Maximum normal force) p. 484
7. Morin 10.25 (Free particle motion) p. 484. The problem asks you to verify that the given ansatz works
by taking derivatives “by hand” and plugging in. To simplify that process, let’s agree to represent the
function x(t) = (A + Bt) cos ωt + (C + Dt) sin ωt by a vector  Then I claim
Then I claim ![]() x can be
x can be
written in matrix form as ∆ ● x. Find the 4→ × 4 matrix ∆, and then use it repeatedly as you express ![]() as ∆ ● ∆ ● x→ and similarly for y , y˙ and y¨ .
as ∆ ● ∆ ● x→ and similarly for y , y˙ and y¨ .
2022-02-17