RBE203TC Automatic Control Theories and Applications Assignment #1
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
RBE203TC
Automatic Control Theories and Applications
Assignment #1
1. Find the transfer function, Y(s)/X(s) of the system with zero initial conditions. [5p]

2. A system is described as

with initial conditions x(0) = 1, x(0) = −1, r(0) = 0. Show a block diagram of the system, giving its transfer function and proper inputs and outputs of blocks. [10p]
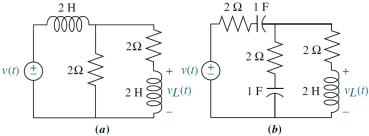
3. Find the transfer function, G(s) = VL(s)/V(s), for the network. [10p (5p each)]
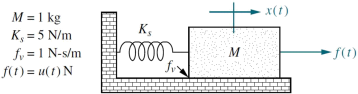
4. Solve for x(t) in the system if f(t) is a unit step. [10p]
5. Find the location of the 2nd order pair of poles. [21p (7p each)]
(a) %OS = 12 %; Ts = 0.6 sec
(b) %OS = 10 %; Tp = 5 sec
(c) Ts = 7 sec; Tp = 3 sec
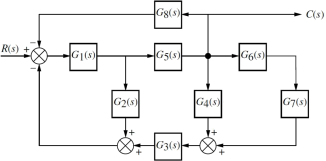
6. Reduce the block diagram to a single block, T(s) = C(s)/R(s). [10p]
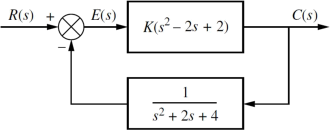
7. Find the range of K to make the system stable. [5p]
8. The transfer function relating the output engine fan speed (rpm) to the input main burner fuel flow rate (lb/h) in a short takeoff and landing (STOL) fighter aircraft, ignoring the coupling between engine fan speed and the pitch control command, is [10p (5p each)]

a. Find how many poles are in the right half-plane, in the left half-plane, and on the jw-axis.
b. Is this open-loop system stable?
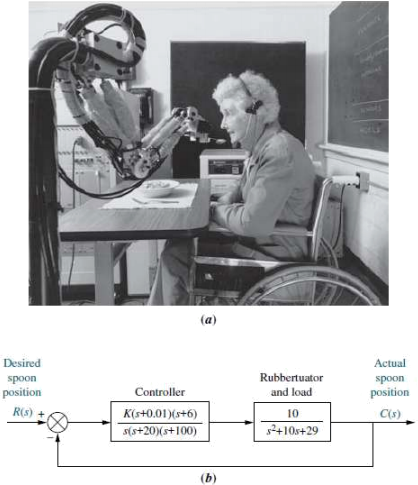
9. A robot arm called ISAC (Intelligent Soft Arm Control) can be used as part of a system to feed people with disabilities (see the figure below). The control system guides the spoon to the food and then to a position near the person’s mouth. The arm uses a special pneumatically controlled actuator called a rubbertuator. Rubbertuators consist of rubber tubes covered with fiber cord. The actuator contracts in length when pneumatic pressure is increased and expands in length when pressure is decreased. This expansion and contraction in length can drive a pulley or other device. A video camera provides the sight for the robot and the tracking loop. Assume the simplified block diagram shown in the figure for regulating the spoon at a distance from the mouth. Find the range of K for stability. [10p]
10. For the system shown in the figure below, what steady-state error can be expected for the following test inputs: 15u(t); 15tu(t); 15t2u(t). [9p (3p each)]
2025-09-24