MFE209TC: Sensors, Instrumentation and Industrial Applications
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
1st Semester MFE209TC: Sensors, Instrumentation and Industrial Applications
Assignment: Bottle Sorting System Design
Submission:
• Deadline: September 26th, 2025
• File: PDF report (5 – 10 pages)
• Method: Upload PDF to the module page in the Learning Mall
• Filename regulation: StudentID_LastName_BottleAssignment.pdf
• Important note: Late submissions without university-allowed valid reasons will not be accepted
Learning objectives:
• For learning outcomes A
Apply the physical principles of sensors such as resistive types, strain gauges, inductive sensors and LVDT to a practical sorting system design.
• For learning outcomes B
Analyze sensor specifications (measurement range, resolution, sensitivity, accuracy, response time) and incorporate them into a design under dynamic conditions (conveyor speed, disturbances).
Overview:
This assignment individually asks students to design an automatic bottle sorting system for a belt conveyor line. Building on basic sensor topics such as resistive sensors, strain gauges, inductive sensors, and LVDTs, you will select appropriate sensors, analyze their specifications (range, resolution, sensitivity, accuracy, and response time), and integrate them into a timing-accurate system that sorts bottles by size (large / medium / small) and, for large bottles, by the presence or absence of a metal cap.
Assignment details:
Design an automatic sorting system for bottles moving on a belt conveyor under the following conditions. Figure 1 shows graphical description of conditions.
• Items to sort: Bottles (large, medium, small). Metal caps randomly occur only on large bottles.
o Large (Plastics): diameter 90 mm, height 200 mm, mass 500 g
o Medium (Glass): diameter 70 mm, height 150 mm, mass 350 g
o Small (Steel): diameter 50 mm, height 100 mm, mass 200 g Note: Variations in size and weight are 10% of each value.
• Conveyor speed: 0.5 m/s
• Mean bottle spacing: 0.3 m (assume individual variation; position perturbation ±10 mm)
• Conveyor width: 0.6 m
• Sorting requirements:
o Separate bottles into lanes by size (Large / Medium / Small)
o For Large bottles only: further classify by presence/absence of metal cap
• Actuator: Flicker mechanism moves bottles to a separate conveyor.
o Assumption: The flicker actuator responds 0.5 seconds after receiving the
control signal from the sensor. Students do not need to consider mechanical acceleration limits or motor dynamics but must account for this 0.5 s delay when designing timing and sensor placement.
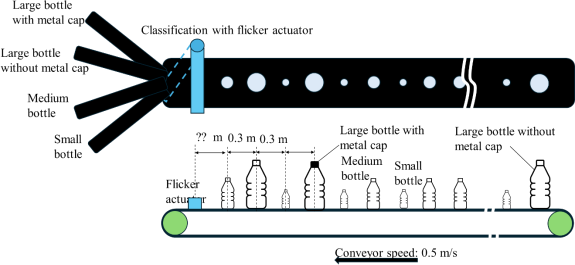
Figure 1 Conveyor for Bottle Sorting System
Student·deliverables:
• Sensor selection & principal explanation (Assessment Criteria A)
o Allowed sensor candidates: LVDT, proximity sensor such as inductive and optical ones, strain gauge, resistive potentiometer
o For each chosen sensor, briefly explain the physical sensing principle and justify why it is suitable for the assigned measurement (e.g., height measurement, cap detection).
o For each chosen sensor, briefly describe the pros and cons ofthe sensors you selected, comparing them with other promising sensors in terms of cost, function and environmental conditions such as temperature, humidity and dustiness.
• Specification design, response, and mounting distance (Assessment Criteria B)
o For each selected sensor provide:
- Measurement range, expected minimum resolution, sensitivity, and typical accuracy (nominal values)
- Response time (rise time/bandwidth) or the basis for the required sampling frequency
- Recommended mounting distance (sensor-to-bottle gap) and a safety margin (e.g., recommended gap ±10 mm)
Note: All products have size and weight variations, and they must be considered in the design.
o Sampling frequency design:
Derive the detection-window time from conveyor speed and bottle dimensions, and compute the minimum required sampling frequency fs
- Detection window time tdetect ≈ (effective detection width + bottle length) / v
- Required sampling frequency fs ≥ Nsamples / tdetect
- Nsamples: Number of samples to be acquired while the bottle is within the sensor detection range. A conservative guideline is to choose Nsamples ≥ 5 to ensure reliable detection.
o Effect of disturbances: Discuss qualitatively or quantitatively how position variation ±10 mm affects detection accuracy or detection probability
• System design and timing (Assessment Criteria C)
o Provide a clear diagram showing sensor placement, signal processing, control output, and the flicker actuator.
o Create a timing diagram showing bottle position, sensor output, control signal, and flicker actuation. Assume the following bottle sequence on the conveyor:
Large (no metal cap) → Small → Large (with metal cap) → Medium.
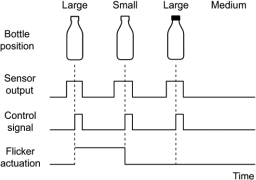
Figure 2 Example of timing diagram
Assumption: The flicker actuator responds 0.5 seconds after the sensor signal. Students must account for this delay when calculating sensor-to-actuator distance and timing.
o Focus on designing the sensor mounting distance, detection timing, sampling frequency, and the effect of position disturbances (±10 mm).
o Include discussion on how sensor placement and timing affect sorting accuracy, considering bottle size variations and conveyor speed.
o Based on the design results, select the sensors that are suitable for your system from the available sensors and identify the model number and manufacturer.
Also estimate the cost of the sensors.
Hint: There are many sensors for sale on Taobao and Jindong. You can estimate the costs on their platform.
• Discussion and improvement suggestions
o Identify potential operational issues (noise, false detection, occlusion, calibration) and suggest mitigation strategies
o Briefly evaluate the trade-offs among candidate sensors from cost and implementation complexity perspectives
Suggested report contents:
1. Abstract (purpose and main conclusion, including your designed system's advantages compared with other systems)
2. Sensor selection and principles
3. Specification table and sampling frequency calculations
4. System design (block diagram & timing diagram, flicker actuator with 0.5 s delay)
5. Discussion and improvement proposals
6. References
7. Data sheets of your selected sensors, which are needed for the design
Please prepare your report according to the IEEE International Conference Template (the MS Word file included with the assignment). Font size and other formatting, as well as the notation of figures, tables, and formulas, must conform to IEEE standards.
Assessment criteria:
• A: Understanding of sensor principles (40%) — Correctness of physical explanations and validity of sensor-to-task mappings
• B: Specification design, response, and distance analysis (40%) — Soundness of sampling frequency derivation, mounting distance/margin decisions, and disturbance analysis
• C: System design, diagrams, and report clarity (20%) — Clarity of block & timing diagrams and overall readability of the report
Notes and constraints:
• Design Concept
o The design must be based on your own ideas.
o Use of AI or others’ work for the design or text is strictly prohibited.
o Clearly describe the purpose, objectives, and requirements of your design.
• Sensor Selection
o Choose sensors appropriate for your design.
o Specify model numbers, specifications, and the rationale for your choice.
o Base your selection on references such as datasheets or literature.
• Formulas, Calculations, and Figures
o All formulas, figures, and numerical values must be based on references or cited sources.
o Cite the source whenever you include a figure or table.
o Ensure that all calculations and figures correspond to your own design.
• Writing and Originality
o Copying text from others or AI is prohibited.
o Explain your design in your own words.
o List all references for literature or online sources.
o Even if your design coincidentally resembles someone else’s, clearly describe your own design process and reasoning.
2025-09-20
Bottle Sorting System Design