5CCE2MCT Mechatronics Coursework 2 (30%) – Control System Design for a Self-balancing Motorcycle
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
5CCE2MCT Mechatronics
Prepared by Dr Francesco Ciriello
You will be required to undertake this alternative assessment in place of your deferred coursework component or as reassessment for your failed coursework attempt. Please note, this also includes in class tests which are scheduled within term outside of the examination window.
This alternative assessment for 5CCE2MCT Mechatronics (2024/25 academic year) is designed to replace the outstanding components below:
Coursework 2 (30%) - Control System Design for a Self-balancing Motorcycle (Group)
Alternative Assessment:
Title Control System Design for a Self-balancing Motorcycle (Individual)
The brief is provided at the end of this document.
Note that you will have to collect a self-balancing bike kit to complete this assessment. Please liaise with Dr Ciriello to arrange for a collection. In particular circumstances whereby collection is not possible and upon confirming with Dr Ciriello, the coursework can be completed using the Multibody simulation of the bike provided on KEATs.
Submission requirements:
• a video demonstration on the bike hardware provided (at a minimum this combines balancing and locomotion in a straight line, you can decide whether you want to demonstrate a more impressive task).
• a 3-page written individual report presenting the results of your design analysis with a maximum of 2 page of supporting figures in appendix. You should use 12pt Calibri (or alternative) sans-serif font with 1 line spacing.
• a zipped file where the project model and data can be shared with assessors.
The alternative assessment is due to be released on Thursday 26th June
As clarified in the email sent to students in June, no extensions will be permitted.
Coursework is due 4pm, Thursday 24th July 2025.
Those with approved KIPS/PAA in place please refer to communications received from the Department (PAA Information for Engineering Assessments Period 3 - August 2025) for further information. If you have not received this, then please contact the UG / PGT office as soon as possible.
Submissions will not be accepted after the deadline has passed, please ensure that you leave plenty of time to check over and upload your work. If you are unable to submit by this deadline, emailengineering-ug@kcl.ac.uk/engineering-pgt@kcl.ac.ukand apply for mitigation as soon as possible. Information on mitigation can be found via KA-01744 · Student Services Online (kcl.ac.uk)
Submissions will not be accepted via email; submissions must be made via the correct KEATS area.
Support for carrying out this assessment is available:
You can reach out to Dr Francesco Ciriello atfrancesco.ciriello@kcl.ac.ukif you have questions about this resit assessment.
Mechatronics 5CCE2MCT Resit Project
Control System Design for a Self-balancing Motorcycle
Module Instructors
• Dr Emmanouil Spyrakos,emmanouil.spyrakos@kcl.ac.uk
• Dr Francesco Ciriello,francesco.ciriello@kcl.ac.uk
Brief
You will work individually on the 5CCE2MCT resit project. Your task is to design and test an autonomous or remote controller for the Self-balancing Motorcycle oftheArduino Engineering Kit, shown in Figure 1.
You will demonstrate your design at the end of the course to a panel of judges composed of academic staff.
CAD components and Simulink starter models are provided in the lab course files in the coursework_group directory.
You are responsible for:
• designing a digital motor controller
• testing the motor controller on the provided hardware
• demonstrating the effectiveness of your design.
Deliverables
• a video demonstration on the bike hardware provided (at a minimum this combines balancing and locomotion in a straight line, you can decide whether you want to demonstrate a more impressive task).
• a 3-page written group report presenting the results of your design analysis with a maximum of 2 page of supporting figures in appendix
• a zipped file where the project model and data can be shared with assessors.
Learning objectives
• Explain how the motorcycle balances and steers.
• Implement and tune a feedback controller to balance and steer the motorcycle
• Test the controller design on a dynamic model of the motorcycle
• Test the controller design on hardware
• Work as a team to deliver a physical design
• Report and justify recommended design implementation

Figure 1: Illustration of assembled motorcycle from the Arduino Engineering Kit.
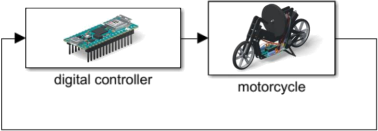
Figure 2: Models provided in MCT lab files under
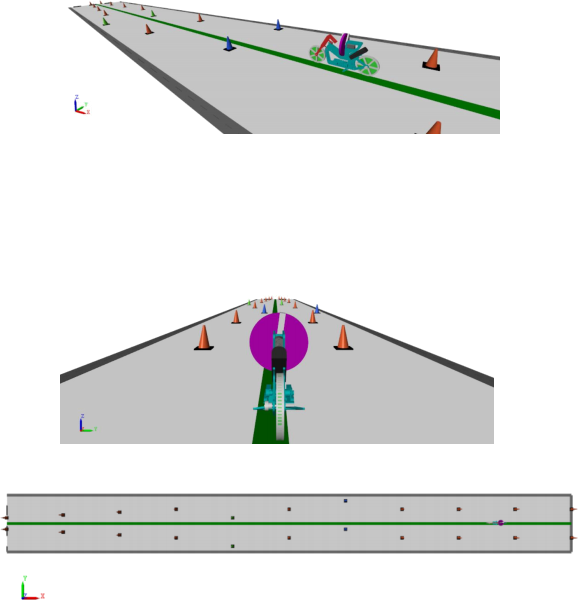
Figure 3: A dynamical model of the motorcycle is provided in addition to the support package files.
sixDof_bike.slx
2025-07-12