Problem Definition and Objectives
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
Problem Definition and Objectives
Introduction and System Overview
Automated warehouse logistics have become a common for modern supply chains, especially for online retailers such as Amazon; Amazon uses a combination of robotic payload robots, combined with AI to organize and move product through its warehouses (Chapman, 2024). The use of robotic systems allows for high volumes to be managed, as doing so by hand would be extremely challenging. The robotic system also allows for around the clock work hours, which can respond to customer demands quickly.
This simulation will use a two-dimensional grid as the warehouse where each cell on the grid will represent an element of the warehouse.
Background (WILL BE FILLED IN LATER)
Problem Statement
WILL BE FILLED IN LATER (Just background info really)
Objectives of the Simulation
The simulation is designed with multiple objectives in mind, which will help explore and improve multi-robot operations in a warehouse environment.
![]() Evaluate Robot Movement and Coordination: We aim to observe how robots move within the
Evaluate Robot Movement and Coordination: We aim to observe how robots move within the
grid, particularly how they coordinate when multiple robots share narrow aisles or converge on the same area. By visualizing their paths, we can identify if and where traffic jams occur and how effectively robots circumvent obstacles (e.g., taking alternate routes when a primary path is blocked). This ties into studying path optimization and real-time re-routing algorithms under various conditions.
![]() Assess Task Allocation Strategies: The simulation allows experimenting with how tasks (like
Assess Task Allocation Strategies: The simulation allows experimenting with how tasks (like
picking from a shelf or delivering to dispatch) are assigned to robots. One objective is to test whether simple rules (e.g., nearest robot takes the task) or more complex algorithms (e.g., considering robot workload and future tasks) yield better performance in terms of completion time and balanced robot utilization.
![]() Identify Bottlenecks and Collision Points: By running scenarios, the simulation should help
Identify Bottlenecks and Collision Points: By running scenarios, the simulation should help
pinpoint recurring bottlenecks—areas of the grid that frequently cause slowdowns, such as a busy intersection between shelves or a congested dispatch zone. Similarly, we aim to log and analyze collision near-misses or forced stops, which indicate where the system needs better coordination or layout adjustments. These findings can guide improvements in either algorithms or physical layout, aligning with the idea of using simulation for decision support (Macal and North, 2010).
![]() Test Various Scenarios for Robustness: Another objective is to push the system under different
Test Various Scenarios for Robustness: Another objective is to push the system under different
conditions to see how it performs. For example, we can simulate a surge in order volume to observe if the robots maintain efficiency or if queueing occurs. Alternatively, introducing a robot downtime (simulating a robot failure or battery recharge) can show how well the remaining robots compensate. Through such stress-testing, we gather data on system performance and resilience. The ultimate goal is to use these insights to suggest improvements or guidelines for real-world systems, such as how many robots are optimal for a given warehouse size or how to redesign task zones for better flow.
Assumptions
To make the simulation manageable in the timeframe given, and to not lose focus, we have made certain assumptions:
Firstly, all robots are assumed to have uniform performance, that is that they all move at the same speed, have the same carrying capacity, battery life etc. This allows us to analyse the performance of the system as opposed to the robots themselves, because they are not the area of interest. Secondly, the layout of the warehouse is assumed to be uniform and does not change between simulations.
We are not simulating dynamic changes of the warehouse, and as such should not be considered.
Thirdly, we are using discrete time steps. On each tick, a robot will make one move, or perform an action (picking up or dropping off an item). Discrete modelling will be used as it is commonly used in logistics modelling (SOURCE THIS), allowing for the simplification of timing and sequencing of events, however it does abstract away continuous motion (SOURCE THIS). This is acceptable due to the granularity of events taking place (one cell per time step). Fourthly, all robots are assumed to have no communications delays or failures, as those would interfere with any movements, and as such are not included in the scope of our analysis. Finally, only a 2D grid is used, as a 2D environment accurately represents the layouts of most warehouses (Source this).
Visual Representation
The simulation will depict the warehouse as a grid-based map, as follows:
• Free Space: Represented by the dots, they show points where the robots can enter freely
• Shelves: Marked with an S, this denotes areas that the robots cannot pass through
• Pickup Zones: Marked with a P, this denotes areas the robots must go to so that they can collect their items or orders
• Dispatch Zones: Marked with a D, these cells denote where robots deliver their completed orders
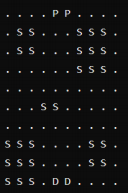
Figure x Storage layout 10 x 10
The robots themselves can be represented by either a cross or circle that move cell by cell on the grid. Using this grid, it is possible to monitor the flow of robots as they move through the warehouse, such as if a “traffic jam” forms, where robots are stuck due to a queue. This could show that the layout needs to change. While we are using a 2D simulation, this can visualize the essence of warehouse operations: identifiable storage areas, clear pathways and the robot’s movements when they are performing their individual tasks.
References
• Chapman, T. (2024). Amazon’s bid to Revolutionise Warehouse Automation. [online]
Supplychaindigital.com. Available at:https://supplychaindigital.com/digital-supply-chain/amazon-warehouse-automation-ai-revolution.
• Bartholdi, J.J. and Hackman, S.T. (2019). Warehouse & Distribution Science. [online]
Warehouse Science. Georgia Institute of Technology. Available at:https://www.warehouse-science.com/book/editions/wh-sci-0.98.1.pdf.
•
2025-06-19