Navigation Systems (ENG:5062)
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
Navigation Systems (ENG:5062)
Additional Exercise
Task: 1
A robotic vehicle is shown in Figure 1 below. It moves with constant velocity Vf and can alter trajectory by changing its heading angle 
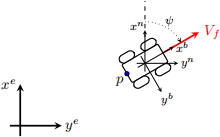
Figure 1
Using the nomenclature presented in your Navigation Systems course (mathematics section), the vehicle body
frame  is the object frame while the reference frame
is the object frame while the reference frame  is defined at some fixed point on the earth’s surface as shown. The position of the vehicle is then denoted
is defined at some fixed point on the earth’s surface as shown. The position of the vehicle is then denoted  where γ can be either e or b. In this scenario, the vehicle velocity (Vf ), defined with respect to the body axes, yields an expression for the velocity observed in the object frame as,
where γ can be either e or b. In this scenario, the vehicle velocity (Vf ), defined with respect to the body axes, yields an expression for the velocity observed in the object frame as,

By computing the appropriate velocity and acceleration vectors, write a MATLAB script that will track the position of the vehicle, resolved in earth axes, with the following control inputs:
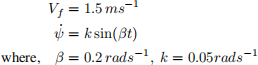
assuming constant acceleration over each timestep, plot the resulting trajectory over 120s (2min). Use the integration schemes defined in the course notes to solve the ODE’s for  and
and  i.e. trapezoidal integration and the fourth-order scheme for
i.e. trapezoidal integration and the fourth-order scheme for 
Task: 2
Copy your code from the previous problem and paste into the space provided below. Now run the code again noticing this time the errSwitch is set to 1.
The purpose of this problem is to check that you have implemented the gyro and accelerometer error models correctly and to show you the effect of these error sources on the performance of the INS estimates.
Task: 3
Copy your code from the first problem and paste into the space provided below. Now run the code again noticing this time both the errSwitch and noiseSwitch are set to 1.
The purpose of this problem is to check that you have added the gyro and accelerometer noise terms correctly and to show you the effect of noise on the performance of the INS estimates.
2021-12-30