ECE 830 Final Project
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
ECE 830 Final Project
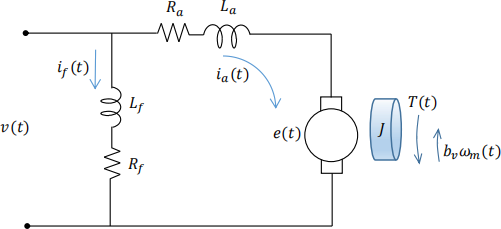
For the shunt-field DC motor, equations of the developed torque, T(t), and the induced voltage,T(t), can be written as follows:

and

These nonlinear equations can be linearized around an operating point as

and

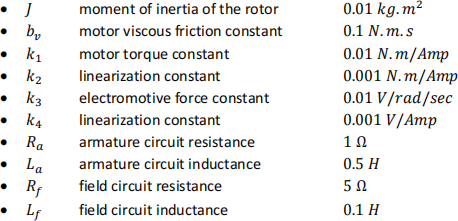
where, k1 , k2, k3 and k4 are assumed motor constants. Also, the DC motor state-space equations can be written as
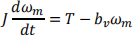
where, J is the moment of inertia of the rotor, and bv is the motor shaft viscous friction constant.
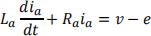
where, La is the armature circuit inductance, and Ra is the armature resistance.
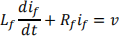
where, Lf is the field circuit inductance, and Rf is the field resistance.
(1) Write the transfer function of the DC machine (open loop system), 
(2) Write the state-space model of the system. (Hint: A will be a 3-by-3 matrix and state variables are ωm, ia, if)
(3) Determine the poles and zeros of the open loop system, if
(4) Design a state feedback controller that for a unit step command in motor speed, where the
control system's output should meet the following requirements.
• Settling time less than 0.4 seconds
• Overshoot less than 5%
(5) Design an observer for the system when the motor input current ia + if = iinput can be
measured, i.e. 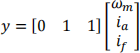 put observer eigenvalues at -20, -50, -100 such that the
put observer eigenvalues at -20, -50, -100 such that the
error of estimation approaches zero rapidly.
Using Matlab Simulink plot each state variable and its estimate and the error.
Hint: Use the class notes, but you can also check a similar problem with “two state variables” (Notice that your project has “three state variables”) solved in
http://ctms.engin.umich.edu/CTMS/index.php?example=MotorSpeed§ion=SystemModeling
2021-12-06