ECE 310 Final Exam Spring 2018
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
ECE 310
Spring 2018
Final Exam
8:00-11:00AM, Wednesday, May 9, 2018
(6 Pts.)
1. Answer “True” or “False” for the following statements.
(a) If the unit pulse response, h[n], of an arbitrary LSI system is zero for n < 0, the system must be causal. T/F
(b) A longer FIR filter can be designed to achieve the transition band width at least as narrow as another shorter FIR filter. T/F
(c) If a system is BIBO stable then it must be causal. T/F
(d) The response of a BIBO unstable LSI system to any non-zero input is always unbounded. T/F
(e) A serial connection of two BIBO stable systems is necessarily stable. T/F
(f) A parallel connection of two BIBO stable systems is necessarily stable. T/F
(4 Pts.)
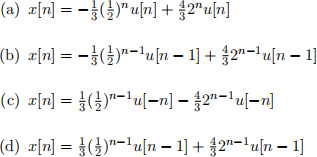
2. A sequence x[n] has the z-transform

Circle all correct x[n] in the following list of answers.
(8 Pts.)
3. Given a causal LTI system with the transfer function:

(a) Determine each of the following:
i. Locations of the all poles and zeros of the system
ii. Region of convergence of H(z)
iii. Is the system BIBO stable?
(b) What is the impulse response {h[n]} of the given system?
(c) Determine a causal linear constant coefficient difference equation (LCCDE) whose transfer func-tion is as above.
(4 Pts.)
4. Consider the following cascaded system with two causal subsystems:
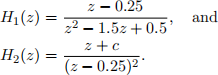
Determine c so that the following cascaded system is BIBO stable.

(4 Pts.)
5. Recall that the convolution of two discrete signals {x[n]} and {h[n]} is denoted as:
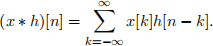
Prove that ((x ∗ h1) ∗ h2)[n] = (x ∗ (h1 ∗ h2))[n] for all n. Draw equivalent system block diagrams for the left side and right side of the equation.
(6 Pts.)
6. An FIR filter is described by the difference equation
y[n] = x[n] − x[n − 6]
(a) Determine the frequency response of the system, Hd(ω).
(b) The filter’s response to the input

is given by

Determine A1, A2, φ1, and φ2.
(4 Pts.)
7. Let (X[k])99k=0 be the 100−point DFT of a real-valued sequence (x[n])99n=0 and Xd(ω) be the DTFT of x[n] zero-padded to infinite length. Circle all correct equations in the following list.
(6 Pts.)
8. Let {x[n]} N−1 n=0 be a real-valued N-point sequence with N-point DFT {X[k]} N−1 n=0.
(a) Show that X[N/2] is real-valued if N is even.
(b) Show that X[h N − ki N ] = X∗ [k] where h ni N denotes n modulo N.
(6 Pts.)
9. The z-transform of x[n] is

Compute the DTFT of the following signals:
(a) {y[n]} where y[n] = x[n] e −jπn/4 , for all n.
(b) {v[n]} where v[n] = x[2n + 1], for all n.
(6 Pts.)
10. The signal xa(t) = 3 sin(40πt) + 2 cos(60πt) is sampled at a sampling period T to obtain the discrete-time signal x[n] = xa(nT).
(a) Compute and sketch the magnitude of the continuous-time Fourier transform of xa(t).
(b) Compute and sketch the magnitude of the discrete-time Fourier transform of x[n] for: (1) T = 10 ms; and (2) T = 20 ms.
(c) For T = 10 ms and T = 20 ms, determinate whether the original continuous-time signal xa(t) can be recovered from x[n].
(4 Pts.)
11. An analog signal xa(t) = cos(200πt) + sin(500πt) is to be processed by a digital signal processing (DSP) system with a digital filter sandwiched between an ideal A/D and an ideal D/A converters with the sampling frequency 1 kHz. Suppose that we want to pass the second component but stop the first component of xa(t). Sketch the specification of the digital filter in such a DSP system, and identify the transition band of that desired digital filter.
(6 Pts.)
12. Let x[n] be the input to a D/A convertor with T = 5ms . Sketch the output signal xa(t) for the following cases. Label your axis tick marks and units clearly.
(a) The D/A convertor is a ZOH and x[n] = 2δ[n] + 3δ[n − 7].
(b) The D/A convertor is an “ideal” D/A and x[n] = 3δ[n − 7]
(8 Pts.)
13. Consider the following system:

where the D/A convertor is an ideal D/A. Assume that xa(t) is bandlimited to Ωmax (rad/sec), T is chosen to be T < π/Ωmax and the impulse response of overall system is h(t) = δ(t − T /2) (or Ha(Ω) = e −jΩT /2 ).
(a) Determine the frequency response Hd(ω) of the desired digital filter.
(b) Determine the unit pulse response h[n] of the desired digital filter.
(c) Determine a length-2 FIR filter g[n] that approximates the above desired filter h[n] using a rectangular window design. Is this designed FIR filter g[n] LP or GLP?
(6 Pts.)
14. Consider the system in the figure below. For each of the following statements determine whether they are true or false. If false, give an example of x[n] and the corresponding y[n] that violate the property.

(a) The system is linear
(b) The system is time-invariant
(c) The system is causal
(d) The system is BIBO stable.
(6 Pts.)
15. Figure below shows the DTFT of a sequence x[n].
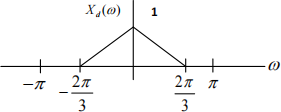
(a) Consider the downsampling operation shown below,

Compute the maximum integer value of M you can use so that no aliasing occurs.
(c) Consider the upsampling operation shown below. Sketch the DTFT of y[n].

(6 Pts.)
16. Let S be a stable LSI system that maps an input signal {x[n]} to a output signal {y[n]} as:
Suppose that instead of {x[n]}, we input {x[n]} into the system S, where {x[n]} differs from {x[n]} only at one sample; that is, for some finite constants n0 and E,

This produces the output signal {ye[n]}. Show that for sufficiently large n, ye[n] approach y[n], which means

Hint: P n∈Z |h[n]| < +∞ implies limn→∞ |h[n]| = 0.
2023-12-05