ELEC207 Instrumentation and Control SECOND SEMESTER EXAMINATIONS 2022/23
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
ELEC207
SECOND SEMESTER EXAMINATIONS 2022/23
Instrumentation and Control
Part A
1. You are tasked with designing a temperature probe to do food safety checks in a fast-food restaurant. You will need to check temperatures at various stations around the restaurant ranging from fridges at 4°C to fryers at 255°C You decide to use a K-type thermocouple for your sensor.
Your thermocouple has the following characteristics:
K-type, sensitivity: 41 µV/°C;
Cold junction compensation at 0°C;
τ = 2s.
Initially you use an amplifier with a gain of 50.
You use an ADC with the following characteristics:
Successive approximations;
10-bit Output;
Reference voltage = 1.024V;
Sampling rate 20kHz.
a) Food safety regulations state that chicken needs to be cooked to at least 70°C. Assuming your probe is at room temperature (20°C) before you test the chicken that is heated to 70°C, answer the following questions, by giving the correct equations not just stating the final value that you calculate:
i) What temperature do you read after 3s?
ii) How long do you need to leave the thermocouple in the chicken to be sure the temperature reading has settled?
b) You initially select an amplifier with a gain of 50.
i) Your ADC returns a value of 205. What is the temperature?
ii) The gain of 50 is not optimised to your temperature range. Design the optimal gain for your system.
c) When doing repeated readings on a vegan sausage roll you get the following readings: 84.8°C, 86.0°C, 84.8°C, 84.5°C, 84.1°C, 86.4°C
Calculate the mean, median, standard deviation, and uncertainty of the mean for the temperature. Be sure to show you working by providing the correct equations not just stating the final value that you calculate.
d) Explain the function of the reference junction or cold junction in a thermocouple.
Total 25
2. You are designing a kitchen scale to weigh ingredients in your fast-food store. You have a single point load cell containing four 350Ω strain gauges with a range of 0-10 kg and a full-scale output of 1mV/V. Your power supply is 5V. Assume a bandwidth of 1kHz and a room temperature of 290K.
a) Draw a circuit diagram for a load cell using four strain gauges in a Wheatstone bridge.
b) Indicate where the strain gauges would be placed on a single-point load cell and label them as in the circuit diagram. Indicate where the force would be applied and which agues are in compression /tension:
Please copy figure 2b into your answer book as a starting point.

c) What output signal would your load cell give for a 2kg test weight?
d) With the 2kg test weight, you detect a total noise level of 1μV. What is the signal-to-noise ratio? (in dB)
e) What is the thermal noise of your load cell at the output?
f) What would be the easiest way to reduce thermal noise for your kitchen scale?
g) Your load cell has a resolution of 3/1g. When choosing a suitable ADC, how many bits are needed to match the resolution over the full range?
h) The wires of your load cell run close to the power lead for your ovens. What kind of interference would expect to dominate and how can you reduce it?
i) Explain accuracy and precision in relation to sensors.
Total 25
Part B
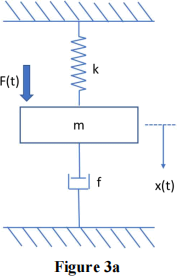
3. a) An object of mass, m, is held between two fixed surfaces by a spring and a viscous damper as shown in Figure 3a. The downward displacement of the object is x(t). The spring has a spring constant of k. The viscous damper has a damping coefficient of f. A time-varying downward force, F(t), is applied to the object. Write a differential equation describing the relationship between x(t) and F(t) in terms of m, k and f.
b) Calculate the transfer function, X(s)⁄F(s).
c) Write expressions for the poles and zeros of this transfer function in terms of m, k and f.
d) The system is second-order, stable and under-damped. Draw the position on the complex plane of the complex poles of such a system.
e) Write an expression for the radius of the poles from the origin in terms of the natural frequency, ω, and damping coefficient, β, of a stable, under-damped second-order system.
f) Write an expression for the radius of the poles from the origin in terms of the natural frequency, ω, and damping coefficient, β, of a stable, under-damped second-order system.
g) Using the answers to questions 3)c), 3)d) and 3)e), or otherwise, write a mathematical expression for the natural frequency and for the damping coefficient of the system shown in Figure 3a in terms of m, k and f.
h) As part of a repair to the system, an engineer has replaced the spring with another spring with a different spring constant, k ≠ k. The resulting system is over-damped such that it has unity gain at low frequencies and two real-valued stable poles at s=-2 and s=-1. Write the transfer function, G(s), of this new system.
i) A unit-step is to be used as the input, F(t), to the system. What is the Laplace transform of the input signal?
j) What is the time response when a unit-step is applied to this repaired system?
k) It has been proposed that a PID controller might be able to improve this time response. Write an expression for the transfer function, C(s), of a PID controller in terms of the three coefficients, KP, KI and KD.
l) Draw a block diagram for a negative feedback system using a cascade PID controller to improve the time response of the mechanical system. Clearly indicate the reference signal defining the desired output, r(t), the input to the mechanical system, F(t), the error signal, e(t), and the output, x(t). Annotate the blocks describing the PID controller and mechanical system with C(s) and G(s) respectively.
Total 25
4. You have been asked to design a controller for a jet engine. The jet engine can be considered to be a plant with transfer function, J(s), where:
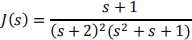
a) What are the poles and zeros of J(s)?
b) Is the plant stable?
c) You have been told to use a negative feedback system with a cascade proportional controller to improve the response of the system. Draw the root-locus for J(s) to describe how the position of the closed-loop poles varies as the proportional gain, K, of a controller varies. Clearly indicate the position of the closed-loop poles when K=0 and K=∞.
d) By inspecting the root locus from Q4)a)ii), what is the maximum number of unstable closed-loop poles that could result from a poor choice for the proportional gain?
e) Assume that we express the transfer function of the jet engine in terms of a ratio of two polynomials such that J(s) = Z(s)⁄P(s). Write the characteristic equation for J(s) as a polynomial in s.
f) Using the first three rows of a Routh table, write an inequality involving K that must be true for the negative feedback system to be stable.
g) What would be two benefits of using a PI controller rather than just a proportional controller in the context of the jet engine?
h) What would be two benefits of using a PD controller rather than just a proportional controller in the context of the jet engine?
i) Another engineer has told a salesman that, by using a PID controller, in place of your proportional controller, you should be able to place the dominant poles at positions that are such that the overshoot is 40%. Calculate the damping ratio that would give this overshoot.
Total 25
2023-08-24