ENG4042/ENG5022 CONTROL 4/M DIGITAL 2020
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
Degrees of MEng, BEng, MSc and BSc in Engineering
CONTROL 4/M DIGITAL (ENG4042/ENG5022)
[OPEN BOOK EXAM] [RESULTS]
XX December 2020
Answer ALL questions in Section A and ONE question from Section B and ONE question from Section C.
SECTION A
Q1 (a) … []
(b) … []
Q2 (a) The formula:
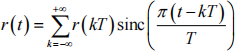
can be used for reconstructing a continuous signal r (t ) from its samples r (kT )
(i) State under which condition(s) exact reconstruction is theoretically possible. [3]
(ii) Explain why this formula cannot be implemented in a realistic scenario, and state arealizable, approximated version of the formula. [4]
(iii) Explain what can be done to improve the reconstruction of the signal in quasi-real-time, and what is the potential impact on system control and signal broadcasting. Use sketches of time-signal plots as required. [8]
(b) Given the following system of two transfer functions in series:
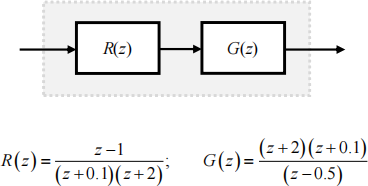
Discuss the system’s asymptotic and BIBO stabilities, after zero-pole cancellations, and justify your answers [5]
SECTION B
Q3 (a) … []
Q4 (a) ... []
SECTION C
Q5 Consider the following digital plant with sample time T = 0.1 s:
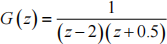
(a) Design a digital PD controller that cancels the unstable pole of the plant, and find the open-loop transfer function L(z). [ K ] [4]
(b) Select the open-loop gain K such that the time constant of the closed-loop system is approximately 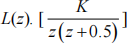 [6]
[6]
(c) Find the values of the damping and natural frequency of the closed-loop system. [0.243; 20.5733 rad/s] [5]
(d) Estimate the steady-state error (of the closed-loop system) in response to a unit step input. [0.803] [5]
Q6 Consider the following low-pass filter:
(a) Find the sampling time that corresponds to 10 times the bandwidth of the filter (frequency at 0 dB). [0. 15 s] [4]
(b) Now set a sample time T = 0.1 s . Calculate the Nyquist frequency. [31.4159 rad/s] [2]
(c) Find the discrete equivalent of the filter, using the pole-zero matching rule; calculate the gain at 负c = 4.19 rad / s , and compare it to that of the continuous filter at the same frequency.  [8]
[8]
(d) Now design another discrete equivalent, using the Tustin rule with pre-warping at frequency ![]() c = 4.19 rad / s . Show that the gain is now preserved.
c = 4.19 rad / s . Show that the gain is now preserved.  [6]
[6]
2023-08-11