COMP4528: Computer Vision Semester 1, 2023 Tutorial 8
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
Semester 1, 2023
Tutorial 8
COMP4528: Computer Vision
Question 1 3D SFM and Image formation
1. (a) Given two calibrated cameras, C1 and C2 , C1 has a focal length of 500 in x and 375 in y , (in pixel unit) the camera has resolution 512 ×512, and the camera centre projected to the image is at (249, 249), with no skew. Suppose C2 has the same image resolution and focal length as C1, but the camera centre projected to the image is at (251 , 252). Write down the calibration matrix K1 and K2 for C1 and C2 respectively.
(b) Suppose that a 3D world coordinate system ((X,Y, Z) coordinates as in Figure1) is defined as aligned with the camera coordinate system of C1. More specifically, the world origin is at the camera centre of C1, the Z axis is aligned with the optical (principal) axis and the X and Y world coordinate systems are aligned parallel with the x and y axes of the image of C1. Write down the matrices K[R|t] which define the projection of a point in the world coordinate system to the image of C1 .

(c) Suppose that the scene has a point, P1, that in the world coordinate system defined above that lies at (39, 35, 100). Note that the points in the world coordinate system are measured in centimetres. What location (to the nearest pixel) will that world point (P1) map to in the image of C1?
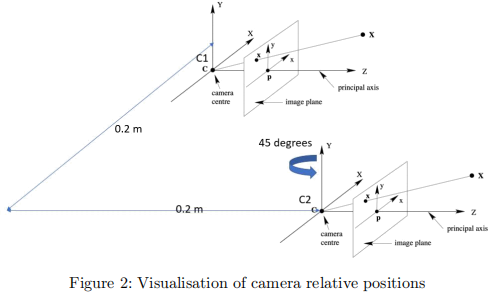
(d) Suppose that with respect to the world coordinate system that is aligned with camera C1 , camera C2 begins being aligned to C1 and is then rotated by 45。 about its vertical axis (Y axis) (as shown in Figure 2), and subsequently, the centre of C2 is translated by 0.2 metre to the left of C1 (along the X axis of C1), then moved forward by 0.2 metre parallel to the optical axis of C1. Write down the matrices K[R|t], which define the projection of points
in the world system (i.e, the same coordinate system of C1) to the image of C2 . (e) Define the term “epipole” .
(f) For camera C1, there is an epipole (or epipolar point) that relates to camera C2. For the two-camera setup for predicting structure from motion, what is the position of the epipole in camera C1 of camera C2? (Hint: It is a point in the image coordinates of Camera C1).
Question 2 Epipolar geometry
1. Describe an algorithm to recover a fundamental matrix between two cameras given a set of 50 putative matching points between the cameras (that may contain errors).
Question 3 Circle Hough Transform
1. Given Figure 3 is an input binary image. You are asked to design an algorithm that can extract the circle in it. You need to estimate all the parameters of the circle.

(a) Please outline your algorithm briefly.
(b) Briefly explain how the circle is extracted by your algorithm, and how the line is ignored by your algorithm.
Question 4 Camera Calibration
1. Complete the coding questions in COMP4528 lab8 code.ipynb
 .
.
2023-07-31