ENGN4528 Computer Vision Final Exam, First Semester 2021
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
College of Engineering and Computer Science
Final Exam, First Semester 2021
ENGN4528 Computer Vision
Question Booklet
Reading time: 15 minutes
Writing time: 2 hours
Uploading time: 15 minutes
ENGN4528
Q1 – Q6
Q1: (Easy Questions)
a. Stereo calculation [5 marks].
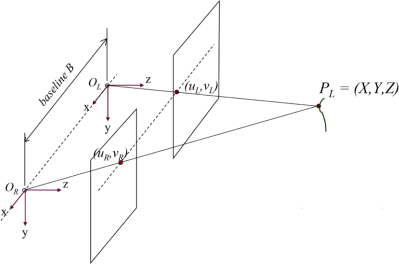
Fig. 1 Stereo Setup.
Given the stereo setup shown in Fig.1. Assume the baseline B = 0.2m, the focal length f = 50 pixels (measured in pixels) for both cameras. The measured pixel coordinates of the
projected point PL in the left and right views are ![]() ,
,
Please calculate the depth of PL relative to the camera, namely, Z.
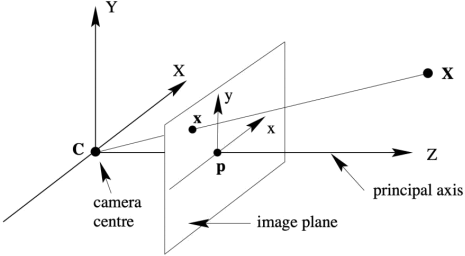
b. Perspective Projection [5 Marks].
Given one calibrated camera, C1 has focal length of 520 in x and 525 in y, (in pixel unit) the camera has resolution 512x512, and the camera centre projected to image is at (249, 253), with no skew.
Suppose that the scene has a point, P1, that in the world coordinate system aligned with C1 that lies at (36, 32, 100)., Note that the points in world coordinate system are measured in cm. What location (to the nearest pixel) will that world point (P1) map to in the image of C1?
Q2: (Easy Questions)
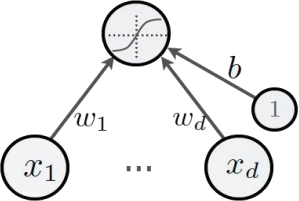
a. Network Forward Propagation [3 marks].
Given below is asingle node in a neural network. Supposing that d is 4, x={1,3,2,7}, and w={0.6,0.2,0.4,-0.4}, b=0.3, and that the activation function is a standard ReLU, that is =max(0,x), where x is the input to the activation function. What is the output of this network?
a. Suppose that the input to a 2x2, stride 2 max pooling layer has the following input in a neural network. What would be the output? [ 4 marks]
|
2 |
4 |
3 |
1 |
|
6 |
3 |
1 |
4 |
|
5 |
1 |
3 |
1 |
|
2 |
3 |
6 |
6 |
b. Suppose that the output vector of the last layer of neural network is [0.1, 0.5, 0.7,
0.9], then a softmax function is applied. What would be the resulting output vector? [ 3 marks]
Q3: (Medium difficulty)
a. Optical Flow [5 Marks]
Optical flow defines the dense motion field of pixels across two image frames. Lucas &
Kanade (1981) proposed a solution to solve the optical flow of all pixels by enforcing the
local patch constant motion constraint, which is known as Lucas-Kanade algorithm. Please answer the following question based on your understanding of the algorithm. What are the conditions the optical flow for that patch can be calculated correctly and accurately?
b. Shape from Shading [5 Marks]
Shape from Shading methods aim to predict the geometric information such as the surface normal from an intensity image. Assume we can capture animage of a planar surface
(Lambertian surface) illuminated by apoint light source at infinity, that is, light rays are all parallel. Suppose that we have used other methods to know the brightness of the lighting, its direction and the reflectance properties of the surface in the above scenario.
We also have the image intensity information for this plane. Describe the distribution of the intensity values on this plane surface. Can the surface normals be obtained from this image given all this information? Please provide the analysis to your answers.
Q4: (Medium difficulty)
a. Homography Matrix VS Fundamental Matrix [5 Marks]
What is the difference between a homography matrix and a fundamental matrix? Explain the answer in one sentence.
b. Stereo [5 Marks]
Assume we have a stereo setup where two cameras are set so that the images are coplanar, and the optical axes are parallel with the camera centres are lying at the same height. One pixel in one view (image) represents a ray that passes through this pixel and the camera
centre. The projection of this ray in the other view defines an epipolar line. Describe the properties of epipolar lines for this stereo setup. Please provide a short answer to your analysis.
Q5: (10 marks) (algorithm design) (Challenging)
Suppose that you have been asked to write software for a camera product: astereo camera rig to obtain dense depth values for all the pixels. The stereo camera rig has been
constructed so that two cameras that are rigidly mounted, pointing with their optical axes in parallel, with their image planes coplanar. The cameras have lenses that can be accurately
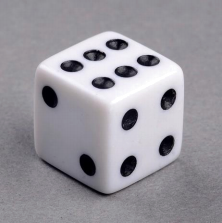
modelled as a pinhole. The rig comes with a large dice for which we know the centre
coordinates of each dot on each side as a calibration device.
You are asked to write software for the camera rig.
Firstly, design an algorithm for the configuration software, to calibrate the camera rig as required.
Secondly, design an algorithm that takes parameters which are the output of the camera calibration process. You need to specify these parameters. The algorithm returns dense depth values for all the pixels that are overlapping in the camera views. Your algorithm should be efficient and accurate.
Please clearly state any reasonable assumptions that you need to make to solve the problem.
Q6: (10 marks) (algorithm design)
Suppose that we have a greyscale video sequence taken by a vehicle moving in the direction parallel to the front of the house (i.e., the sequence shows multiple views of the house). The
images were taken at 2pm, but they were meant to betaken at 1pm. To correct this
mistake, your task is to correct the lighting (namely, brightness of the Lambertian surfaces) for post-production to make it appear as if the images were taken at 1pm. Both the original sequence and the required appearance show a bright sunny day on the same day of the
year. There is no requirement to change the surrounds of the house, only the appearance of the house itself. Propose an algorithm and a set of steps to change the appearance of the
house in the images. Hint: you may need to specify some information that you can
reasonably assume to be provided, such as requiring some measurements to betaken of the house, and the sun has the same brightness, and the positions of the sun at these times of
the day. Please note you do not need to be concerned about the shadow, just assume that all visible surfaces have direct illumination from the sun).

2023-07-28