EE-246: Intelligent Transportation Systems: Final
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
EE-246: Intelligent Transportation Systems: Final
1) (30%) A semi-tractor trailer crosses a set of dual detectors with the geometry shown below.

The signals from the loop sensors are given below.
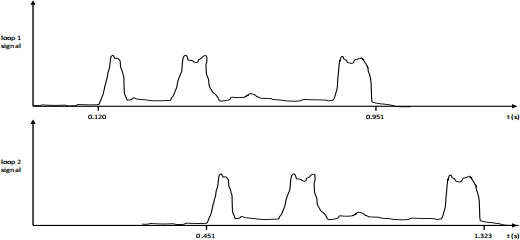
a) How long is the truck and trailer combination?
b) What is the average speed of the truck?
c) Is the truck accelerating or decelerating? If so, calculate the value.
.
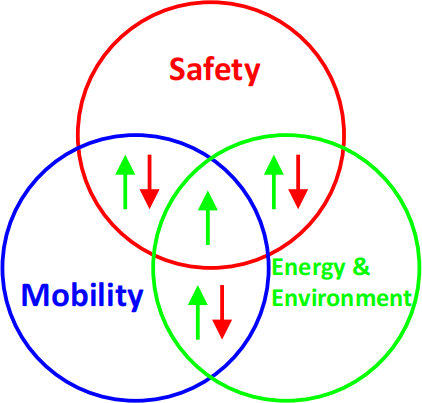
2) (30%) In class, we discussed many different ITS user services, automated vehicle maneuvers, and connected and automated vehicle applications. These have all been designed to have some positive impact on Safety, Mobility, and/or Energy & Environment. However, some of these might improve in one area, but be detrimental in another area. For each arrow in the diagram below, describe a user service, maneuver, or CAV application that might be synergistic or complementary (green arrow) in two or more areas, or create a trade-off (i.e., non- complementary) between two or more areas (red arrow). Describe each of these in detail, explaining how they are complementary or non-complementary.
Safety & Mobility:
Complementary Scenario: Non-complementary Scenario:
Safety & Energy:
Complementary Scenario: Non-complementary Scenario:
Mobility & Energy: Complementary Scenario: Non-complementary Scenario:
Safety & Mobility & Energy:
Complementary Scenario:
3) (40%) Open-Ended Design: Consider an automated vehicle that can autonomously navigate the roadways in Los Angeles. Components of navigation can be categorized into several layers:
low-level: e.g., lane keeping (lateral control), car-following (longitudinal control such that the
car doesn’t run into a preceding vehicle), obstacle detection;
mid-level: e.g., obstacle (collision) avoidance, lane maneuvers (e.g., merging, passing, etc.); high-level: e.g., route planning, congestion avoidance
3a) Develop the general design (architecture) for this intelligent vehicle by starting with a block
diagram and describe the automobile sensors, a hierarchical sensory processing structure, knowledge representation, a hierarchical behavior generation component, actuators, and other components. Assume that general goals are given a priori to the automobile from the users (e.g., the final destination is specified).
3b) Choose a component of navigation (as listed above) and provide further detail on how it
can be implemented within the framework specified in 1a). As part of the component design, suggest some kind of learning mechanism that can alter the automobile’s general behavior while navigating. Be sure to include features in the autonomous vehicle that make it an “intelligent system” . Your solution should include diagrams, descriptions, state- machines, etc. as you see fit.
.
2023-06-06